Autonomous Driving
A condução autônoma em vias públicas exige uma localização precisa dentro da faixa de poucos centímetros. Mesmo os melhores sistemas de localização baseados em GNSS (Sistema Global de Navegação por Satélite) podem não atingir esse nível de precisão, especialmente em um ambiente urbano, onde o sinal é perturbado por edifícios e artefatos circundantes.
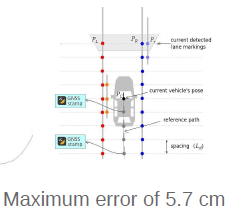
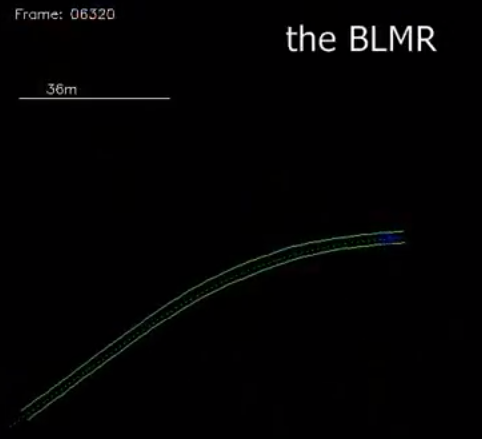
Nossa abordagem explora uma combinação de um detector de marcação de faixa visual de curto alcance e um sistema de navegação por dead reckoning para construir uma percepção longa e precisa das marcações de faixa no veículo. Esse método é chamado de BLMR – Back Lane Marking Registry, e as informações obtidas são usadas para localizar o veículo em um mapa, que também contém a trajetória de referência para a condução autônoma.
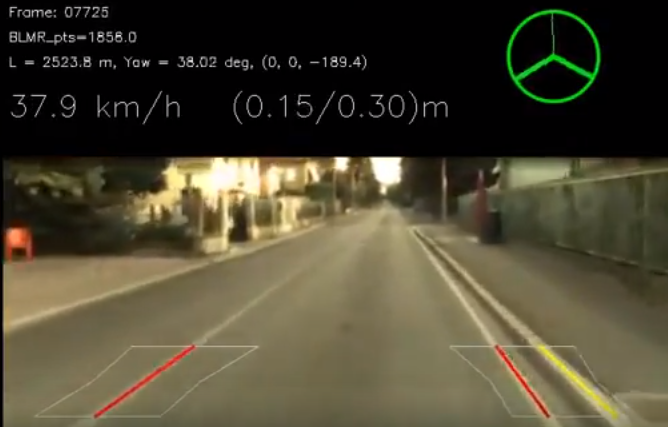
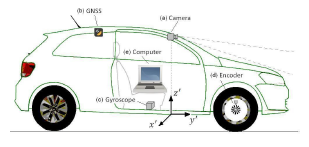
O sistema utiliza uma arquitetura de sensores de baixo custo e algoritmo de fusão de dados capaz de permitir a condução autônoma em estradas estreitas de mão dupla. Os resultados experimentais demonstram a aplicação bem-sucedida do sistema proposto em uma situação real de condução autônoma. A precisão obtida é suficientemente alta para permitir a condução autônoma em estradas estreitas.


Este projeto foi concluído em 2017, e dois artigos foram publicados sobre o tema. Para lê-los, clique nos links abaixo:
- A Low Cost Sensors Approach for Accurate Vehicle Localization and Autonomous Driving Application
Rafael Vivacqua , Raquel Vassallo and Felipe Martins. MDPI – Sensors (Basel), 2017. - Self-Localization Based on Visual Lane Marking Maps: An Accurate Low-Cost Approach for Autonomous Driving
Rafael Peixoto Derenzi Vivacqua, Massimo Bertozzi, Pietro Cerri, Felipe Nascimento Martins, and Raquel Frizera Vassallo, IEEE – Transactions on Intelligent Transportation Systems, 2017.